World’s First Robot Safety Analysis Solution SafetyDesigner













































To use collaborative robots safely and quickly, a process of diagnosing 'safety' is essential. You can find the optimal layout and speed for maximizing productivity with SafetyDesigner.
To use collaborative robots safely and quickly, a process of diagnosing 'safety' is essential. You can find the optimal layout and speed for maximizing productivity with SafetyDesigner.
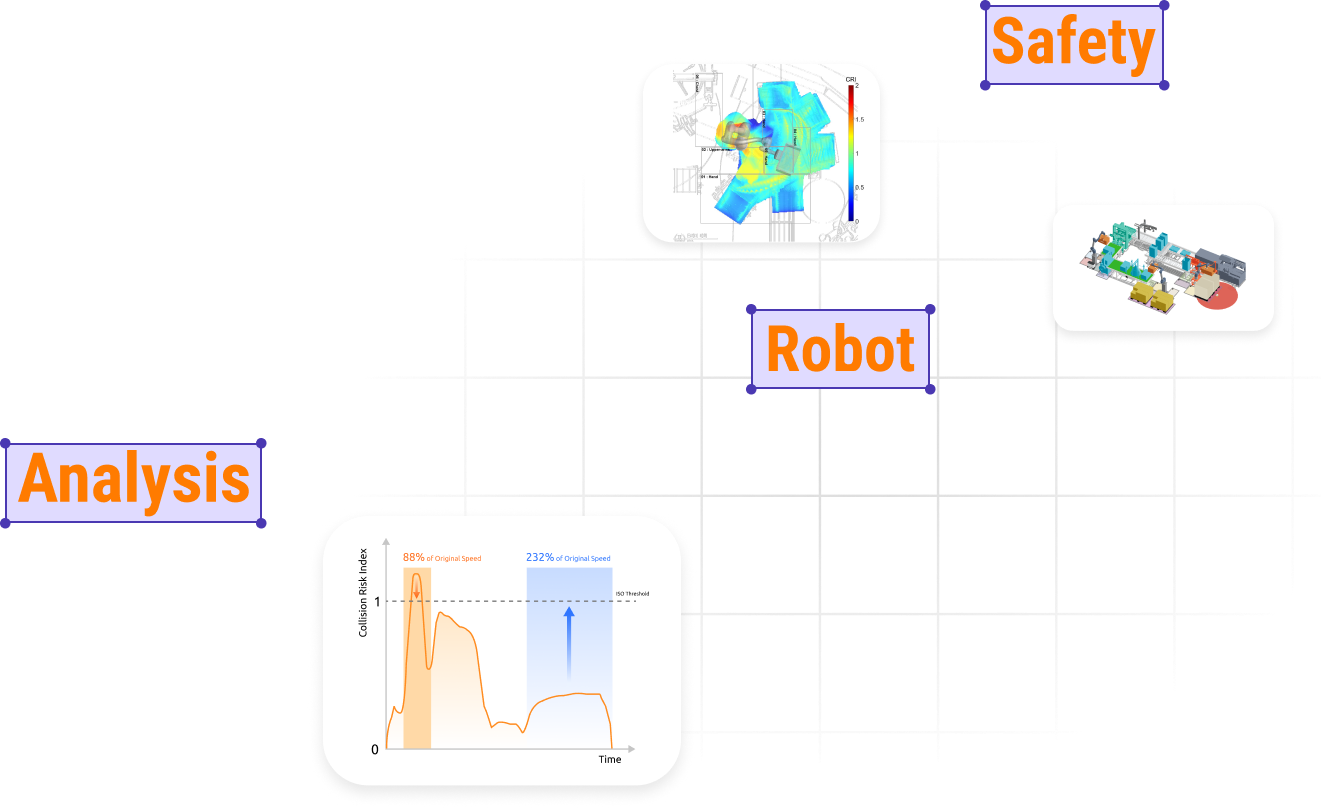
SafetyDesigner’s safety analysis feature provides information that allows even non-experts to easily determine compliance with global standards. It also helps secure both safety and productivity by recommending the maximum speed that meets these standards.
Generate expert-level reports automatically based on collision risk analysis and risk assessment results.
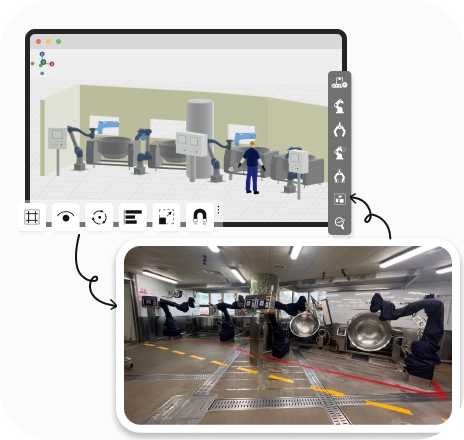
Analyze safety even before robot installation to prevent various issues related to safety after installation.

Quantitatively determine compliance with collision safety standards (ISO/TS 15066, KOROS 1162-1).
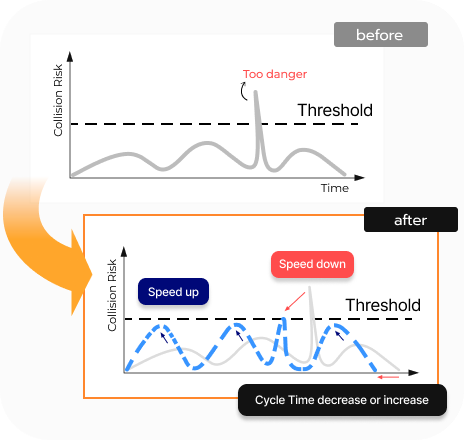
By recommending the fastest speed that meets standards, you can ensure both the productivity and safety of your robot system.

Perform a risk assessment that meets standards and regulations based on the 3D layout and robot system information.
Generate expert-level reports automatically based on collision risk analysis and risk assessment results.
Analyze safety even before robot installation to prevent various issues related to safety after installation.
Quantitatively determine compliance with collision safety standards (ISO/TS 15066, KOROS 1162-1).
By recommending the fastest speed that meets standards, you can ensure both the productivity and safety of your robot system.
Perform a risk assessment that meets standards and regulations based on the 3D layout and robot system information.
Generate expert-level reports automatically based on collision risk analysis and risk assessment results.
Quantitatively determine compliance with collision safety standards (ISO/TS 15066, KOROS 1162-1).
By recommending the fastest speed that meets standards, you can ensure both the productivity and safety of your robot system.
Perform a risk assessment that meets standards and regulations based on the 3D layout and robot system information.
Generate expert-level reports automatically based on collision risk analysis and risk assessment results.
Analyze safety even before robot installation to prevent various issues related to safety after installation.
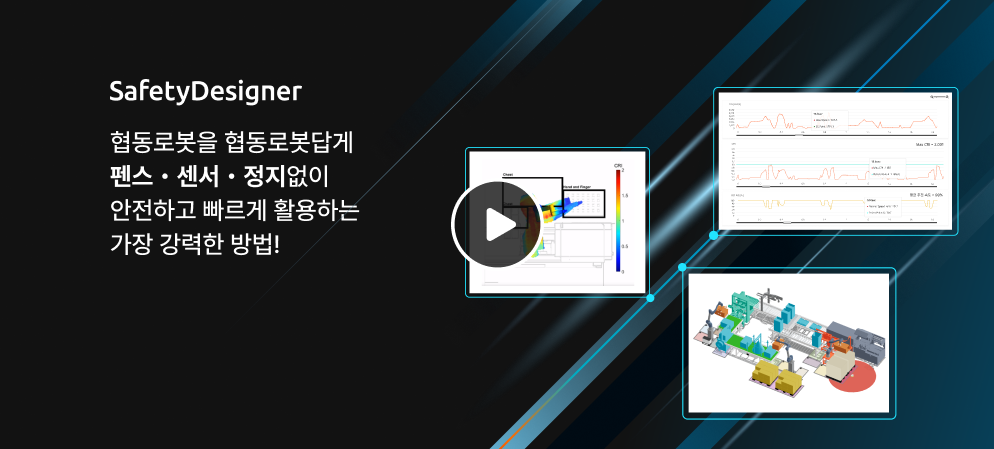
With a 3D library-based design approach, you can quickly design your desired robot system. By implementing robot motions as if teaching a real robot, you can create a robot system that closely resembles its actual movements.

In addition to the built-in library, you can upload and use 3D models that you have created.

Provide a feature that allows you to upload a 2D layout image of the robot system and quickly design it into a 3D layout.

With the built-in 3D library, you can complete the layout design in just a few clicks.
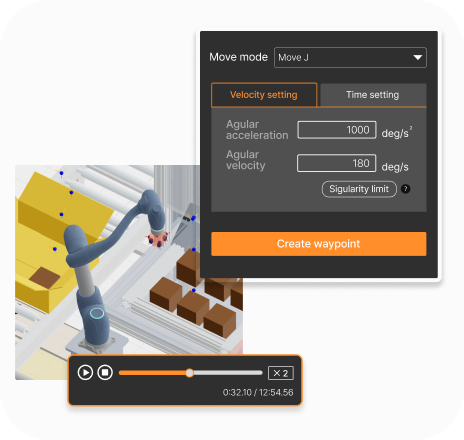
By implementing a motion creation feature identical to the actual robot teaching method, you can create motions in advance and use them for analysis, even without a physical robot.
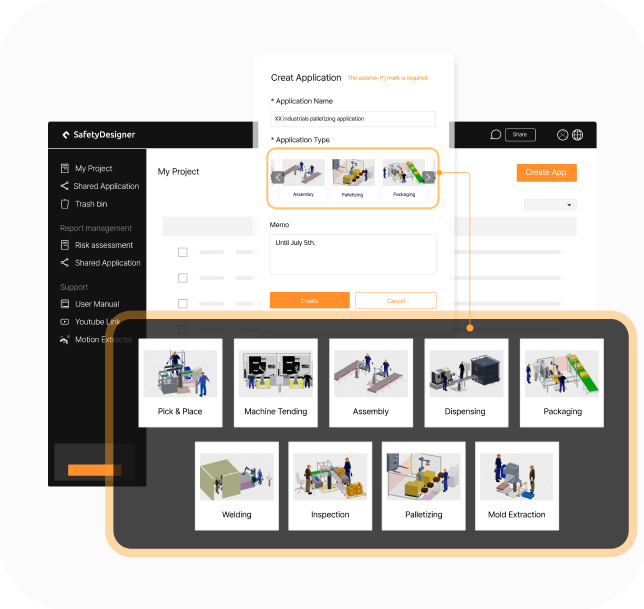
Provide sample projects for representative applications using robots, allowing you to quickly complete conceptual designs.
In addition to the built-in library, you can upload and use 3D models that you have created.
Provide a feature that allows you to upload a 2D layout image of the robot system and quickly design it into a 3D layout.
With the built-in 3D library, you can complete the layout design in just a few clicks.
By implementing a motion creation feature identical to the actual robot teaching method, you can create motions in advance and use them for analysis, even without a physical robot.
Provide sample projects for representative applications using robots, allowing you to quickly complete conceptual designs.
In addition to the built-in library, you can upload and use 3D models that you have created.
With the built-in 3D library, you can complete the layout design in just a few clicks.
By implementing a motion creation feature identical to the actual robot teaching method, you can create motions in advance and use them for analysis, even without a physical robot.
Provide sample projects for representative applications using robots, allowing you to quickly complete conceptual designs.
In addition to the built-in library, you can upload and use 3D models that you have created.
Provide a feature that allows you to upload a 2D layout image of the robot system and quickly design it into a 3D layout.
Through the application sharing feature, smoother communication between system integrators (SI) and robot-using companies is possible. You can record discussion points about application sharing in real-time and manage the history using the comment feature.
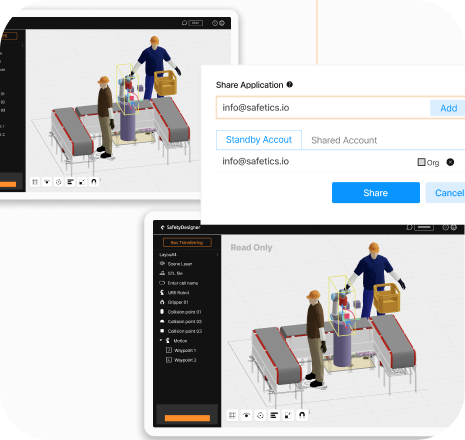
Share 3D applications without any issues related to software compatibility or security.
View and collaborate on 3D applications anytime, anywhere as long as you have an internet connection.

Communicate requests for the robot system in real-time and record layout changes for each piece of equipment within the conversation.
By using SafetyDesigner, you can maximize productivity in applications
that use collaborative robots without fences, sensors, or stops,
while also minimizing safety costs.
By using SafetyDesigner, you can maximize productivity in applications
that use collaborative robots without fences, sensors, or stops,
while also minimizing safety costs.
from Safetics’ technology!


