Robots that transport, collaborate with people, and navigate autonomously — how do they do it all? The answer lies in their structure and operating principles. Here's what's inside a robot and which components are defining the next wave of development.
1. Three Core Subsystems
1️⃣ Control system (Software)
The robot's brain — issues all movement commands via the Robot Operating System (ROS). Supervises and coordinates all robot functions.
2️⃣ Sensor system (Hardware)

The robot's sensory organs — reads external signals (light, distance, force, etc.) and enables response. For autonomous mobile robots navigating around obstacles, the sensor system is the defining subsystem.
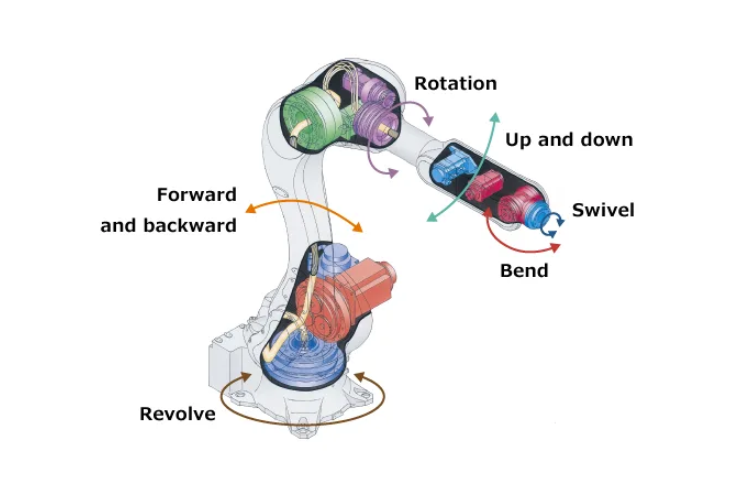
3️⃣ Drive system (Mechanical)
Converts commands into physical movement. The key component is the actuator — a motor-type device that drives motion. Higher actuator degrees of freedom (DOF) produce more natural, human-like movement.
The three subsystems map to the three structural layers: software (control), hardware (sensing), mechanical (actuation).
2. Four Key Components and Technologies
✅ Manipulator
The robot arm — comprising joints connected by links. Actuators convert electrical power into motion; end-effectors (grippers and tools) attached at the distal end perform the actual work. The controller supervises and regulates all arm movement.
✅ Reducer (Gearbox)

Reduces motor rotational speed to increase output torque — an essential component wherever electric motors are used. Eugin Investment Securities (February 2023) highlighted reducers as a core robot industry beneficiary with significant growth potential across quadruped robots and humanoids. The assessment remains accurate.
✅ Camera and Force/Torque Sensors

Camera = vision; force/torque sensor = touch. Together they enable robots to perceive their environment and sense external forces — expanding the range and flexibility of executable tasks. Advanced sensing directly improves collision safety: a robot that can see and feel contact handles human proximity more reliably.Camera = vision; force/torque sensor = touch. Together they enable robots to perceive their environment and sense external forces — expanding the range and flexibility of executable tasks. Advanced sensing directly improves collision safety: a robot that can see and feel contact handles human proximity more reliably.
✅ Power and Force Limiting (PFL)

The software-based approach to human-robot safety coexistence. Rather than physically separating humans and robots via fencing or sensors, PFL validates safety by comparing the forces and pressures generated during human-robot contact against internationally defined biomechanical threshold limits. If contact forces are below the permitted threshold, the robot is certified safe to operate without stopping — even in a shared workspace.

Real-world PFL deployments: Sungkok Middle School (school cafeteria cobot) and Hanwha Ocean (welding cobot) both achieved safety certification using PFL mode, operating without fencing or sensors. Safetics' SafetyDesigner enables web-based PFL validation — from process design through collision simulation to safety certification report output.

The Direction of Robot Development
Every structural and component advancement points toward the same destination: robots that move like people, work with people, and coexist naturally with people. That goal is no longer theoretical — it's being built, certified, and deployed today.
For safe and productive robot deployment, contact Safetics.
![]()

