요즘엔 흔히 로봇이 옮기고 사람과 협업도 하고 스스로 이동하는 모습을 볼 수 있는데요.
로봇의 진화는 지금 이 순간에도 계속되고 있습니다!
이 모든 걸 로봇은 어떻게 할 수 있을까요?
로봇의 구조와 동작 원리에 그 해답이 있습니다.
특히 각광받는 부품이 뭔지, 트렌드 체크💫까지 함께 알아봐요.
1. 로봇의 구성
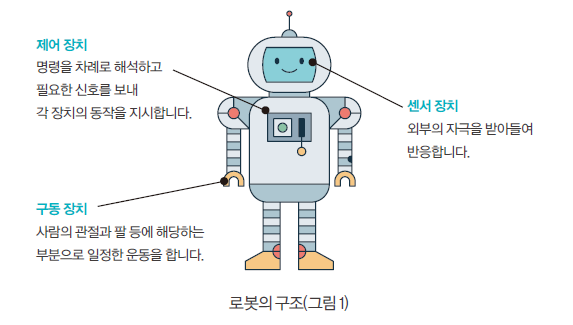
로봇은 크게 1️⃣ 제어 장치 2️⃣ 센서 장치 3️⃣ 구동 장치가 연결된 기계입니다.
1️⃣ 제어 장치
제어 장치는 로봇이 움직이기 위해 명령을 내리는 역할을 합니다.
Robot Operating System : ROS라고 하는 로봇의 운영 시스템을 사용하고요.
쉽게 말해 로봇의 '뇌' 역할을 하는 컴퓨터라고 보면 될 것 같아요.
2️⃣ 센서 장치

센서는 외부 신호를 읽는 장치에요.
인간의 감각 기관처럼 빛과 같은 자극을 읽고 반응할 수 있도록 해주는 거죠.
요즘 거리에서 만나곤 하는 자율주행로봇은 외부 장애물을 피해야 하므로
이 센서 장치가 핵심이 로봇 중의 하나라고 할 수 있습니다.
3️⃣ 구동 장치
로봇이 외부 신호를 읽고 명령을 받으면 그 값을 출력해야겠죠.
실제 우리가 볼 수 있는 로봇의 움직임을 위한 장치가 바로 구동 장치입니다.
가장 중요한 부품으로는 일종의 모터 역할을 하는 액추에이터가 있고요.
엑추에이터를 활용한 로봇의 자유도가 높아질수록
좀 더 자연스러운, 인간 같은 움직임을 보이는 로봇이 될 수 있습니다💪
정말 복잡하고 다양한 부품과 기술의 집합이 바로 로봇 아닐까 싶은데요.
로봇의 쓰임이 무한히 확장될 수 있는 이유이기도 하죠.
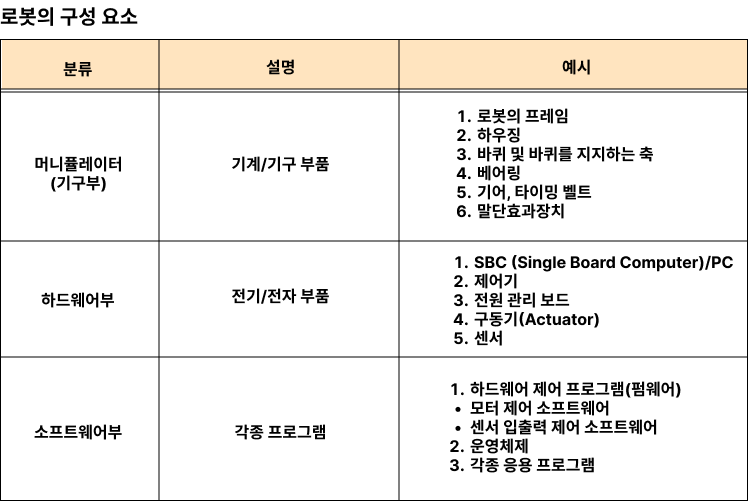
로봇을 구성 면에서 보면 크게 하드웨어/ 소프트웨어/ 기구부로 나눌 수 있는데요.
제어 장치는 소프트웨어에, 센서 장치는 하드웨어에,
구동 장치는 기구부에 해당한다고 보시면 될 것 같아요!
그럼, 각 구성에 따라 가장 주목해야 할 핵심 기술 및 부품에 대해 좀 더 알아볼까요?
2. 지금, 로봇의 주요 부품 및 기술
✅ 머니퓰레이터(manipulator)
머니퓰레이터는 로봇 팔로, 직접 운동을 하는 관절(jount)과
관절 사이에 연결된 링크(link)로 구성됩니다.
액추에이터에 의해 동력이 운동으로 변환되어 말단에 부착된 그리퍼 등의 툴이
실질적인 작업을 수행하게 되는 원리에요.
제어기는 이런 로봇의 운동을 제어하며 감독하는 역할을 하는 거고요.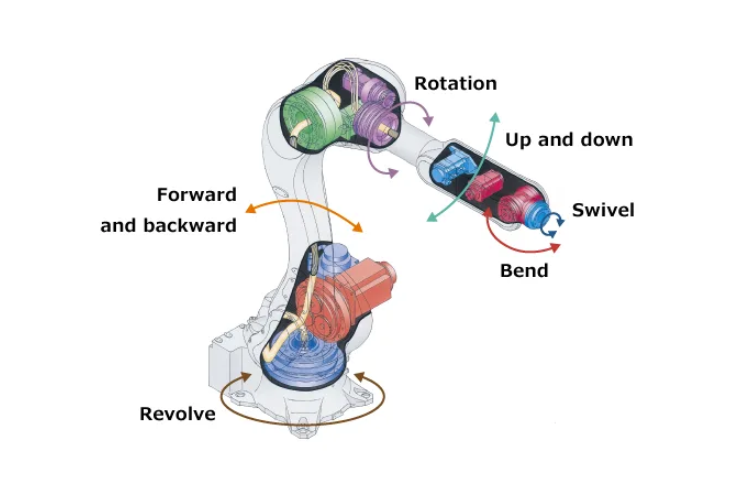
✅ 감속기(reducer)

감속기는 모터 동력의 회전 속도를 낮춰 출력을 높여주는 장치인데요.
감속기는 로봇 산업 성장에 수혜를 얻은 대표적인 부품이기도 합니다.
'감속기는 로봇의 힘을 키워주는 핵심 부품으로 전기 동력(모터)가 사용되는 한 반드시 필요한 핵심 부품이다.
장기적으로는 다족보행로봇과 휴머노이드에 사용될 수 있어 성장 잠재력도 매우 크다.'
(출처 = 유진투자증권, 로봇산업, 23.02.27)
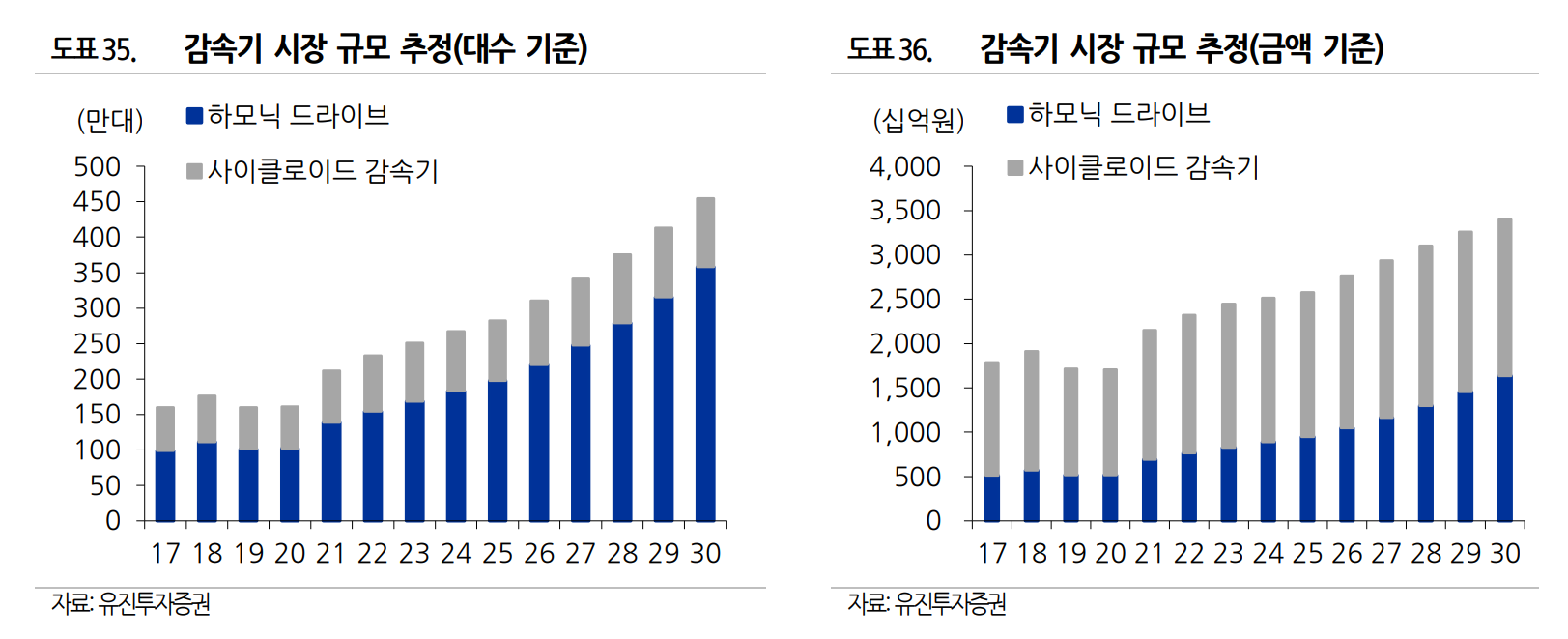
2023년 유진투자증권의 로봇 산업 전망 자료에서는
감속기의 중요성과 성장 가능성에 대해 반복 강조 하고 있는데요.
그만큼 중요한 부품이고 앞으로 더 성장이 기대되는 시장이라고 볼 수 있어요.
✅ 카메라와 힘/토크 센서(sensor)

카메라와 힘/토크 센서는 로봇에게 각각 시각과 촉각 기능에 해당하는데요.
로봇이 더욱 고도화되기 위해 반드시 필요한 부품입니다.
로봇이 '보고', '외력을 느낄 수 있다면' 더욱 폭넓고 유연한 작업을 수행할 수 있겠죠?
식당에서 서비스 로봇이 테이블과 이동하는 사람들을 피해 서빙하는 건 당연한 일이 된 것처럼요.
이러한 센서가 발달하면 결국, 충돌 안전성을 더욱 향상되는 결과를 낳을 거예요.
✅ 동력 및 힘 제한 Power and Force Limiting (PFL)

사람과 로봇의 공존을 위한 안전성 확보, 소프트웨어적인 방법은 뭐가 있을까요?
혹시 동료와 같은 공간에서 일할 때,
✔️일정 거리를 유지해야지 ✔️절대 닿지 말아야지
두 가지를 의식 하고 일하시나요?

사람과 사람 사이에는 거리가 아무리 가까워도, 심지어 닿아도,
'괜찮다=안전 허용'이 자연스럽게 발현되기 때문에 서로 믿고 일합니다.
이걸 '안전 감각' 이라고 하는데요.
이걸 로봇에게 학습시킨다면 사람처럼 '진짜' 함께 할 수 있지 않을까요?

작업자가 재료를 손질하고 레시피에 맞게 담기만 하면
조리흄이 발생하는 요리(볶거나 끓이는 연기가 나는 작업)나
힘이 많이 드는 단순 반복적인 조리 작업은 로봇이 해줄 수도 있겠고요.

용접처럼 고열과 높은 습도 등의 열악한 환경에서도
사람은 로봇을 제어하고 그 과정을 확인하는 정도로만 일을 할 수도 있을 거예요.
무엇보다 중요한 건 그러한 협동작업을 '한 공간'에서 안전하게 함께 할 수 있다는 것!
꿈같은 이야기가 아닙니다.
PFL 모드를 활용해 안전인증을 획득한 숭곡중학교와 한화오션의 실제 사례인데요.
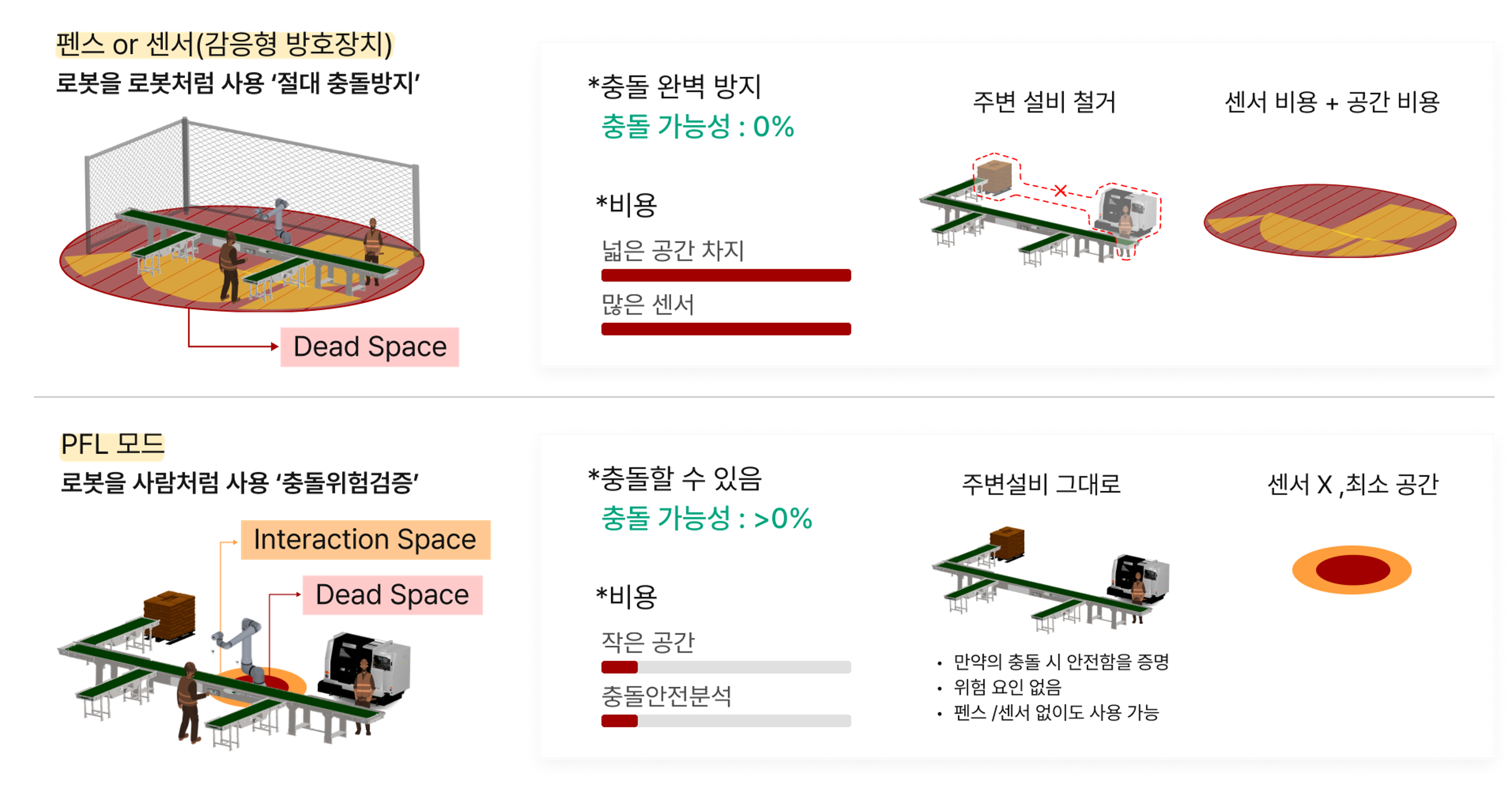
펜스나 센서와 같은 안전장치를 통한 물리적인 차단이 아닌
사람-로봇 간 충돌했을 때의 수치를 표준의 허용치와 비교해, 충돌해도 '안전하다'
인정해 주는 방식이 바로 Power and Forece Limiting(PFL) 모드의 적용입니다.
PFL을 활용해 웹상에서 사전에 충돌 검증을 고려 공정 설계부터 시뮬레이션, 결과 보고서까지
얻을 수 있는 프로그램이 SafetyDesigner입니다.
로봇을 똑똑하고 안전하게 사용할 수 있는 좋은 기술 발전의 한 예가 되겠네요.
자, 이제까지 로봇의 구조와 구성을 크게 나누고
그 안에서 대표적인 부품과 기술의 발전성을 알아봤습니다.
로봇의 발전 방향과 목표는 결국✨
사람처럼, 사람과 함께, 자연스러운 공존인 것 같네요.
![]()
협동로봇 안전에 대한 절차나 비용이 장애가 되지 않도록,
세이프틱스가 도와드릴게요.
그럼 다음 기사에서 또 만나요👋

