
안녕하세요! 오늘은 로봇 안전에 대해 알아보려고 해요.
로봇과 인간이 함께 일하는 곳에서는 안전이 무엇보다 중요하죠.
이번 글에서는 PFL(Power Force Limiting) 기술과 기존의 로봇 안전 조치가 어떻게 다른지,
왜 PFL 모드가 필요한지 알려드릴게요! 😊
1. PFL이란 무엇일까요? ⚙️
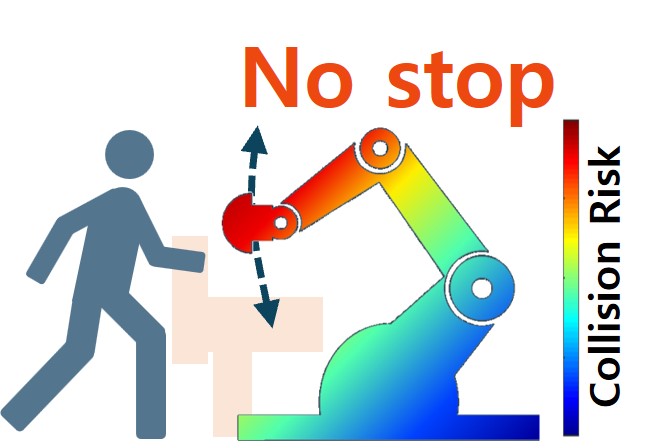
PFL(Power Force Limiting)은 로봇이 사람과 가까워도 안전하게, 힘과 속도를 제한하는 기술이에요.
이 기술이 있으면, 사람이 로봇 근처에 있어도 로봇이 멈출 필요 없이 작업을 계속 할 수 있어요!
덕분에 울타리 없이도 안전하게 로봇과 사람이 협업 할 수 있답니다!
2. 기존 로봇 안전 조치: 펜스🚧와 센서🛑
전통적인 로봇 안전 조치는 주로 물리적 펜스와 긴급 정지를 위한 센서를 사용했어요.
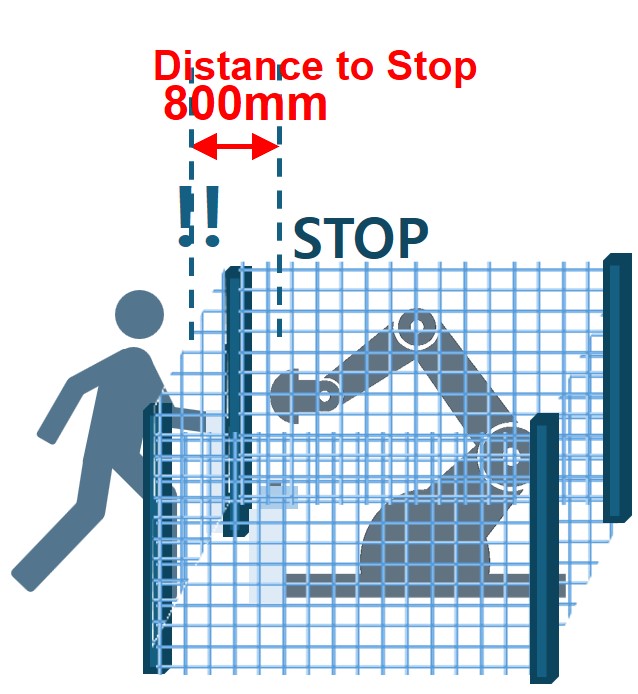
🚧 펜스: 로봇과 작업자 사이에 1.8m이상의 울타리를 설치해, 작업자가 로봇에 접근하지 못하게 해요.
펜스 안으로 사람이 들어오면 자동으로 로봇이 정지하는 방식이에요.
🛑 센서: 로봇 주위로 움직임을 감지하는 센서가 있고, 센서가 사람을 감지하면 바로 정지해요.
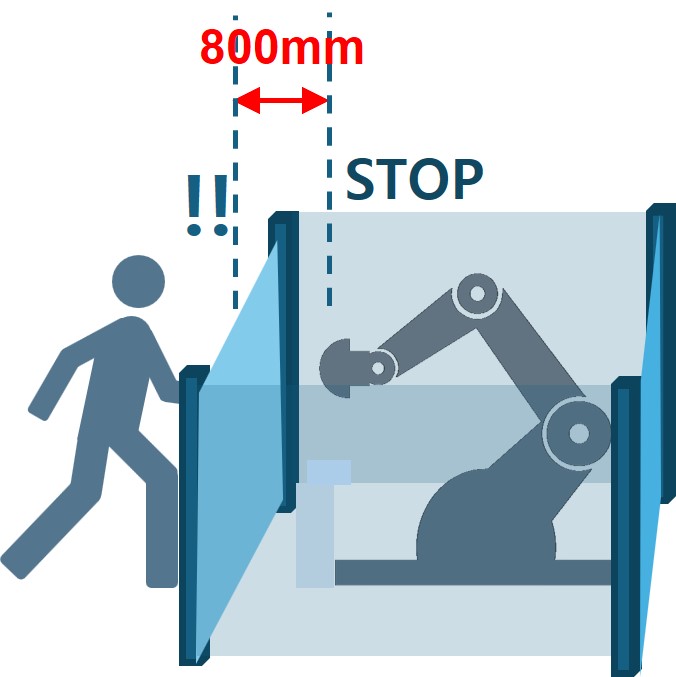
센서에는 두 종류가 있는데, 라이트커튼과 레이져스캐너에요.
라이트커튼은 센서를 펜스처럼 활용하여 사람이 지나가면 자동으로 로봇이 정지하는 방식이고,
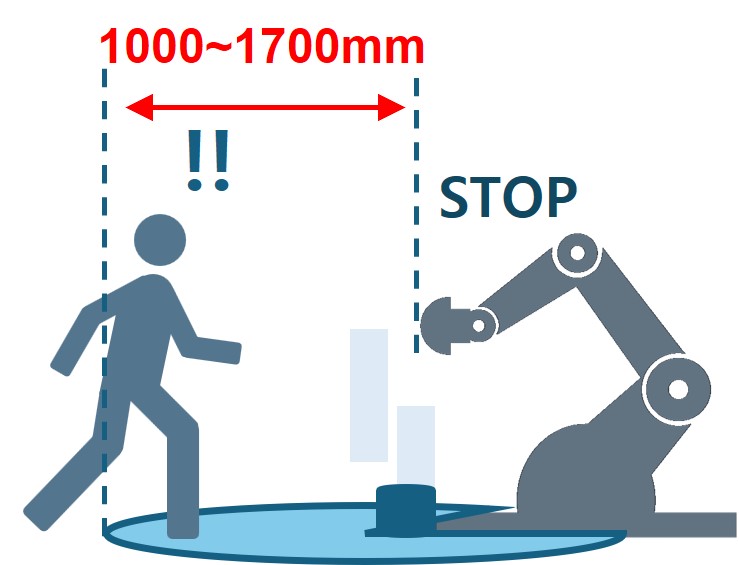
레이져스캐너는 일정 영역에 레이져를 쏴서 사람이 인식되면 로봇이 정지하는 방식이에요.
펜스와 센서 모두 사람이 로봇 근처로 오면 로봇 작동을 중지하고,
각각 펜스와 센서를 설치하기 위한 공간이 필요하다는 제약이 있어요.
3. PFL과 펜스, 센서의 차이점 💡
1️⃣ 진정한 의미의 협동로봇
PFL을 사용하면 로봇이 멈추지 않고, 사람이 로봇 근처에서 안전하게 협업 할 수 있어요.
따라서 진정한 협동로봇으로써의 활용이 가능하죠.
기존 방식에서는 물리적 울타리(펜스 또는 센서)가 필수이고, 사람이 접촉하면 로봇이 정지했기 때문에
실질적으로는 사람과의 원활한 협업은 어려웠어요.
2️⃣ 공간의 효율적인 활용
기존 방식에서는 펜스와 센서를 설치할 물리적 공간이 필요했지만,
PFL을 사용하면 물리적 공간이 필요하지 않아 작업공간을 더욱 효율적으로 활용할 수 있어요.
4. PFL의 주요 장점 🌟
PFL 기술을 통해 안전성과 효율성 두 마리 토끼를 모두 잡을 수 있어요!
1️⃣ 안전성 보장: PFL모드를 통해 로봇은 사람과 충돌해도 안전한 힘과 속도로 움직이고,
충돌을 감지했을 때, 즉시 멈추어서 안전한 작업을 보장해요.
2️⃣ 공간 활용도 확보: 물리적인 울타리를 설치하지 않아도 되기 때문에 공간 활용도가 높아져요.
기존에 펜스나 센서를 설치할 자리에 협동 로봇 한 개를 더 놓아 생산성을 높일 수 있답니다.
3️⃣ 작업 효율성 증가: 사람이 접근해도 로봇이 멈추지 않으니 생산성이 향상되어요.
이런 장점 덕분에 많은 기업들이 PFL 모드에 관심을 갖고 있어요!

5. PFL이 미래의 로봇 안전을 이끈다 🚀
PFL은 기존 로봇 안전 조치를 뛰어넘는 기술이에요.
물리적인 울타리가 필요 없고, 작업 중단 없이 사람과 로봇이 안전하게 협업 할 수 있기 때문이죠.
앞으로 로봇과 사람의 협업이 더욱 복잡해질수록, PFL에 대한 관심 증대와 기술 발전 또한 계속될 거에요.
세이프틱스의 SafeDesigenr를 통해, 손쉽게 PFL 모드를 도입해보세요! ✨
![]()

